autonomous water line inspection robot.
Share
To be able to guarantee the quality of our drinking water and prevent waste, requires effective management and maintenance of vast pipeline networks. We developed a prototype inspection robot for the SubMerge consortium of drinking water companies. The robot can autonomously navigate water lines to collect required current data.
constructional and mechatronic masterpiece.
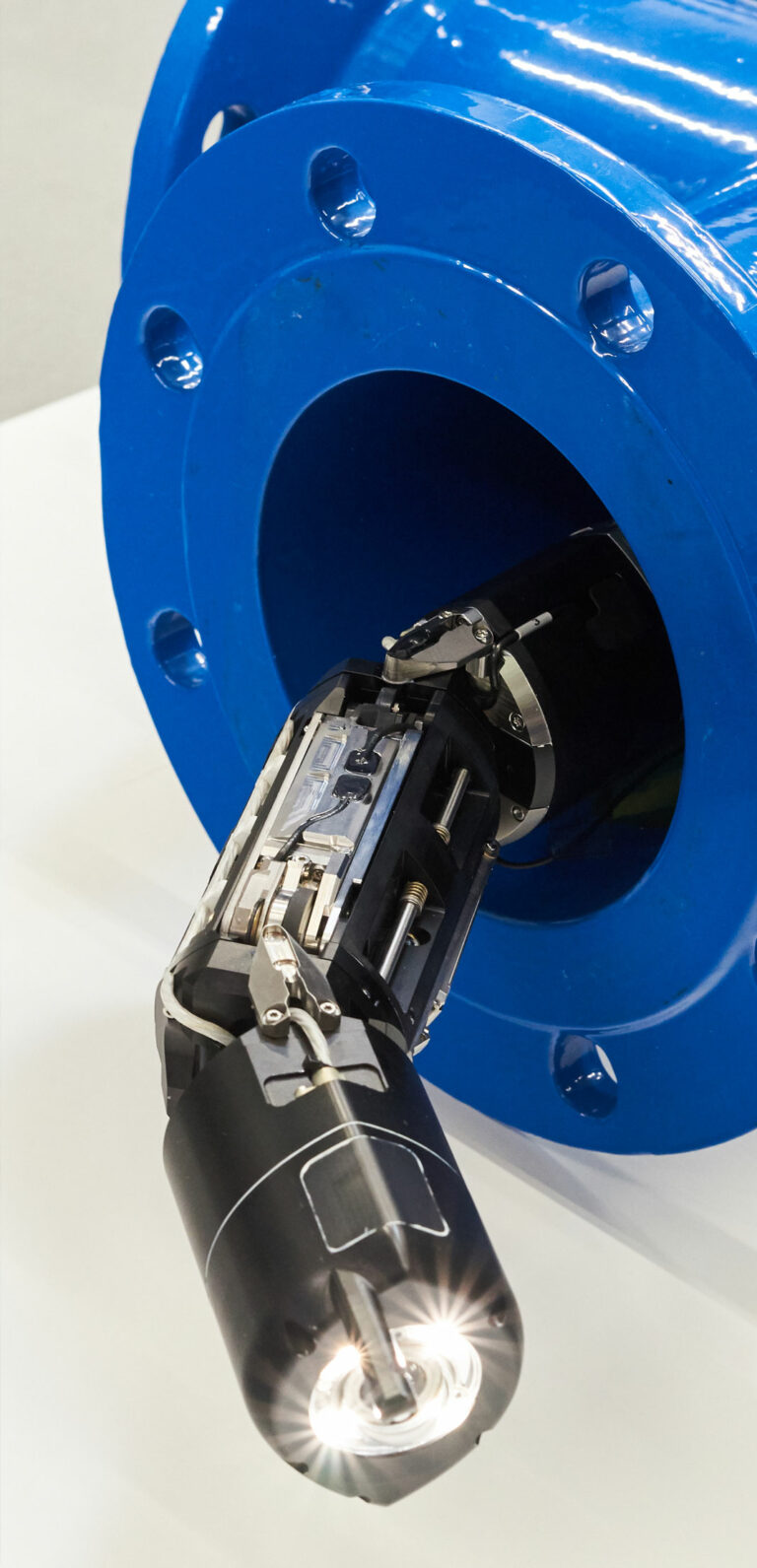
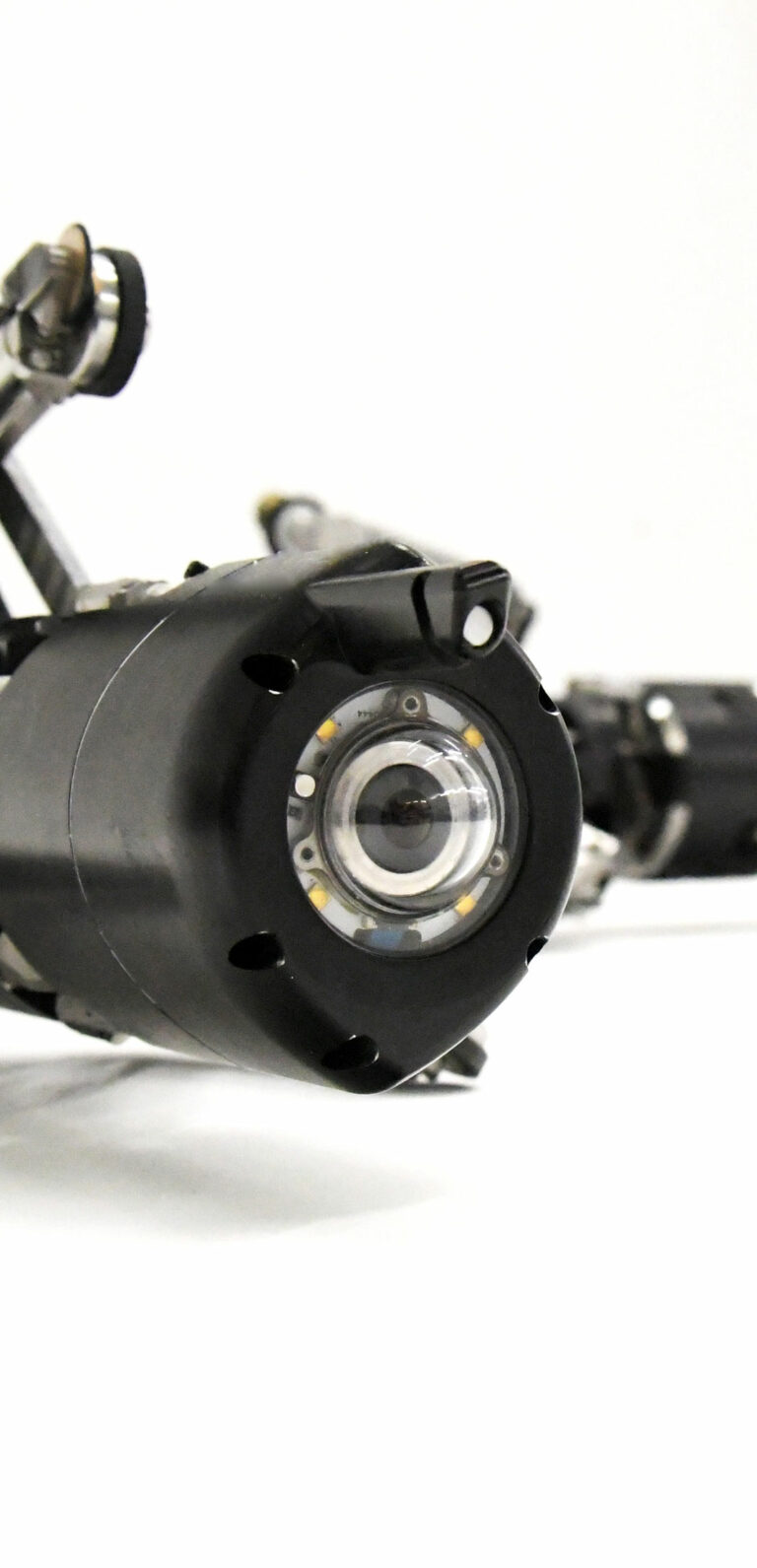
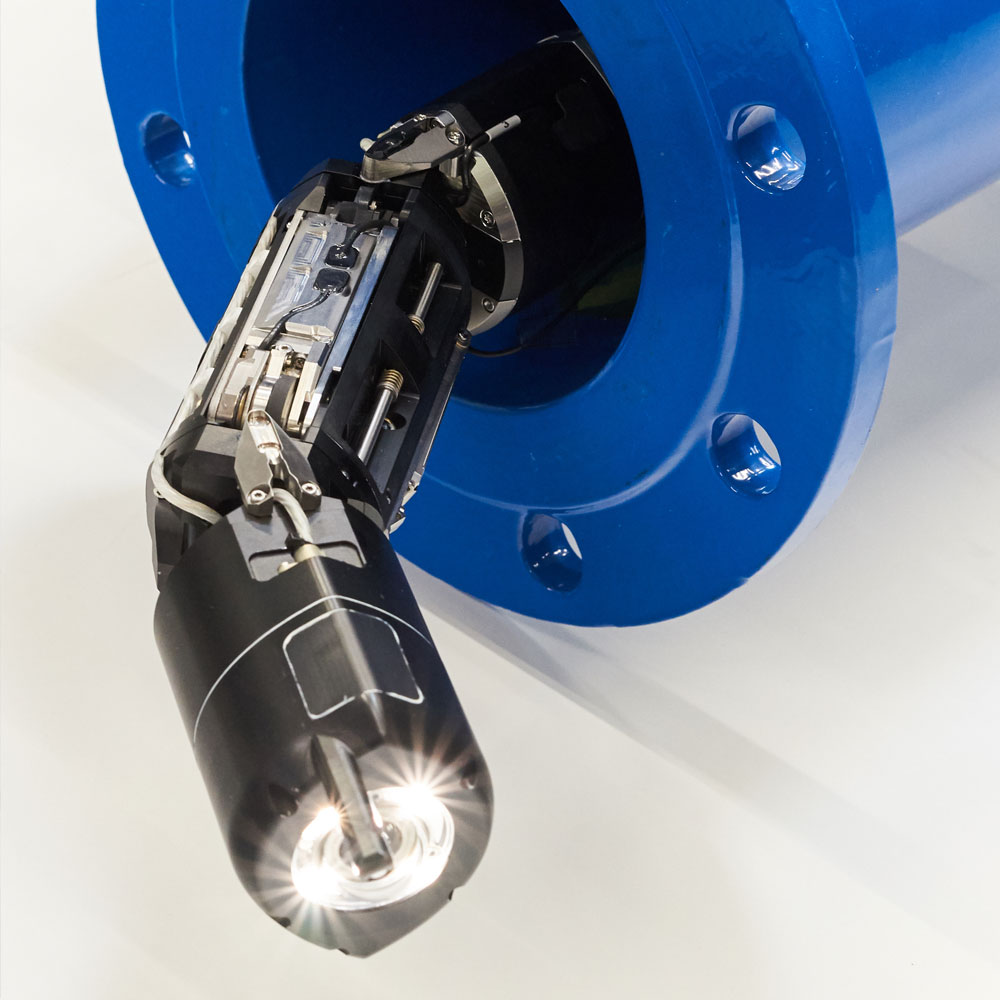
The autonomous inspection robot can help track down leaks and corrosion in water lines, and map out complete networks. We developed the articulated robot as a constructional and mechatronic masterpiece with fifteen independently driven wheels and nineteen articulated modules. The modules contain cameras, computing power, drives, batteries, charging coils and sensors. The robot is like a snake – fully stretched it is over two meters long – that must be able to maneuver in narrow pipes, for example through right-angle bends.
training 'on dry land'.
Our biggest challenge was that the robot had to operate fully autonomously in the pipeline, because there is no wired/wireless connection with a central computer. This is why the robot uses a neural network, among other things, to maneuver through a pipeline on the basis of the images produced by its camera. We first trained the robot on dry land using synthetic data, particularly to interpret the camera’s images: for example is it seeing a bend, a constriction, a bubble or an obstacle? Furthermore, it can ‘hear’ leaks through means of a hydrophone.

“the savings can be enormous.”
Clean drinking water is one of the global challenges that can be addressed using innovative technological solutions. The savings on maintaining the pipeline networks, and ultimately guaranteeing water quality, by making use of these inspection robots can be enormous. Moreover, there are cooling water or process water pipelines, for example, that also require inspection. We perceive opportunities here as well.