autonome inspectierobot voor waterleidingen.
Delen
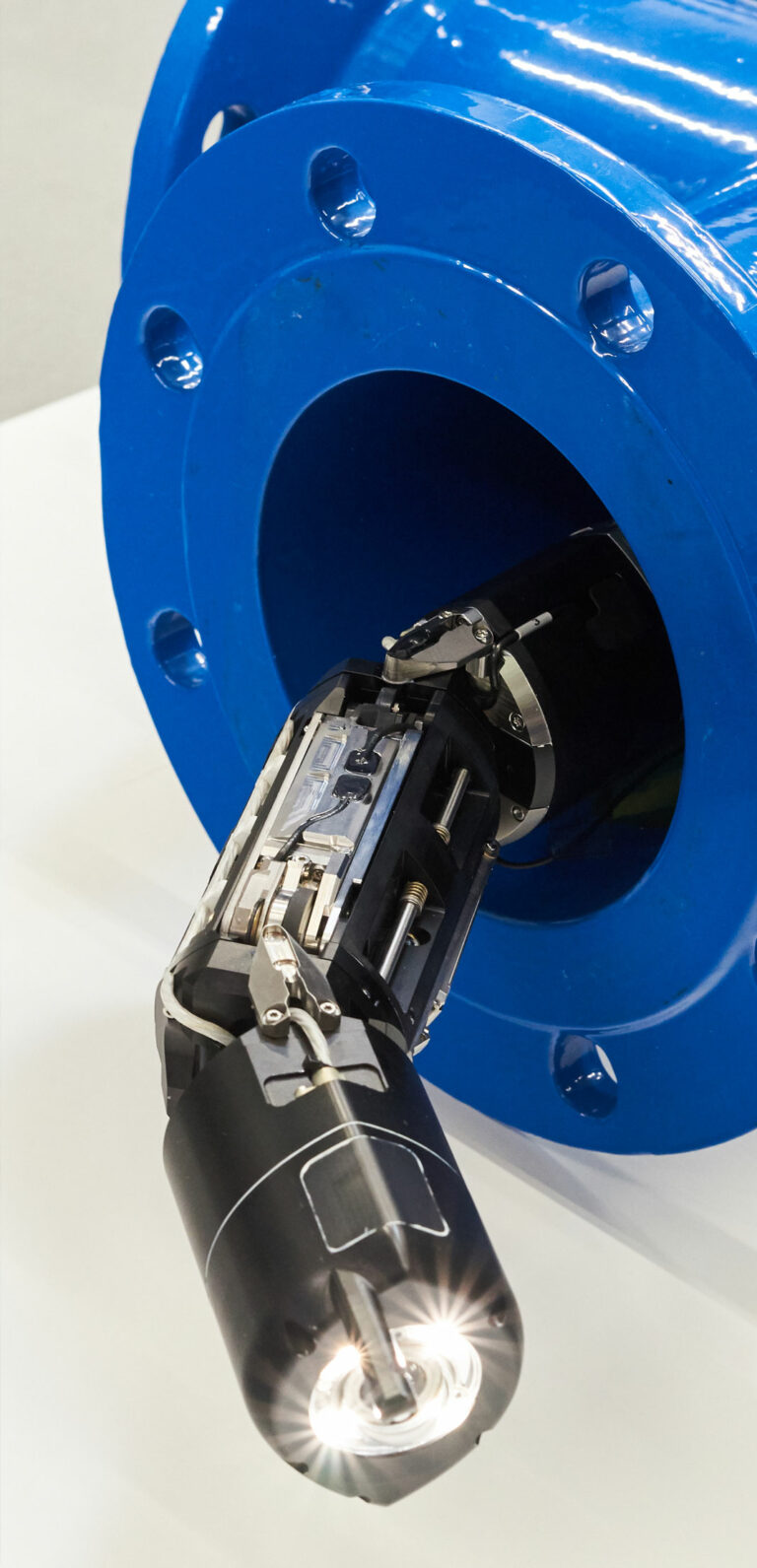
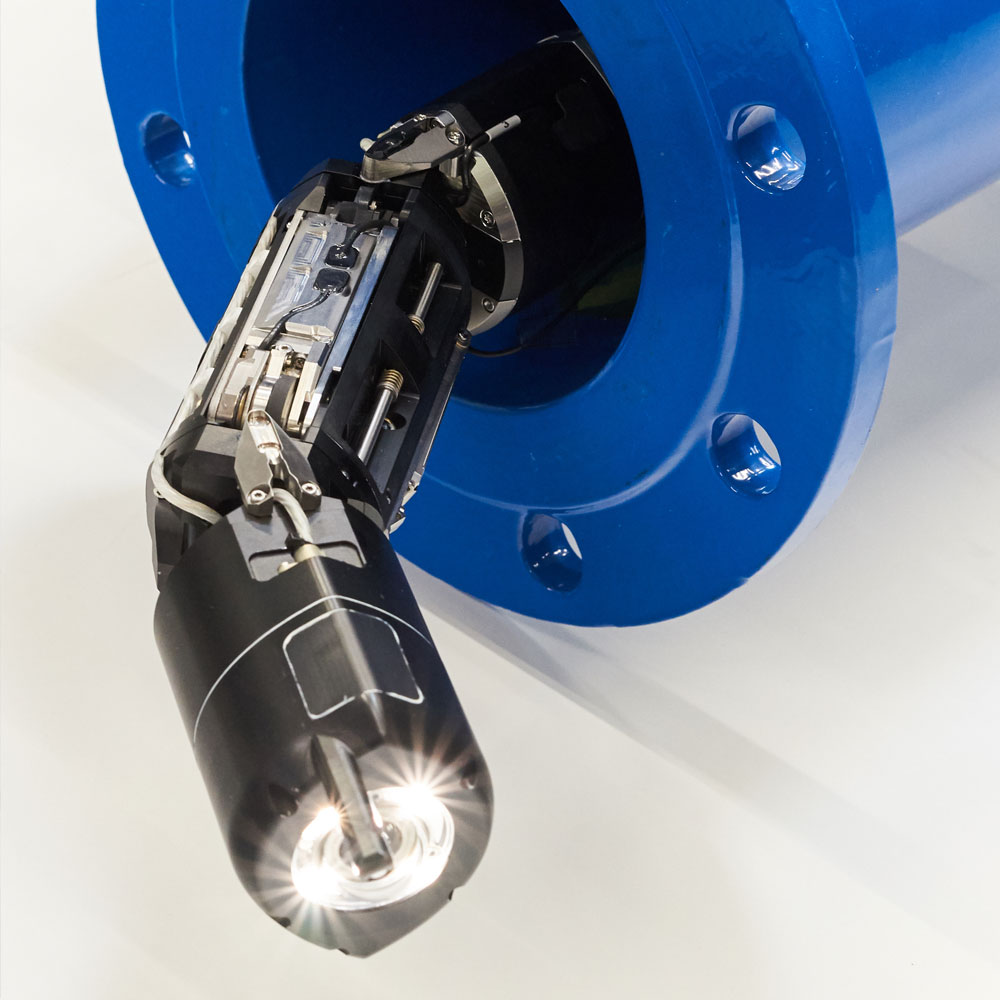
Om de kwaliteit van ons drinkwater te kunnen garanderen en verspilling tegen te gaan, is een goed beheer en onderhoud van de uitgestrekte leidingnetwerken nodig. Voor de recent in SubMerge verenigde drinkwaterbedrijven hebben wij een prototype inspectierobot ontwikkeld. Deze kan autonoom door de waterleiding navigeren om de benodigde actuele data te verzamelen.
constructietechnisch en mechatronisch hoogstandje.
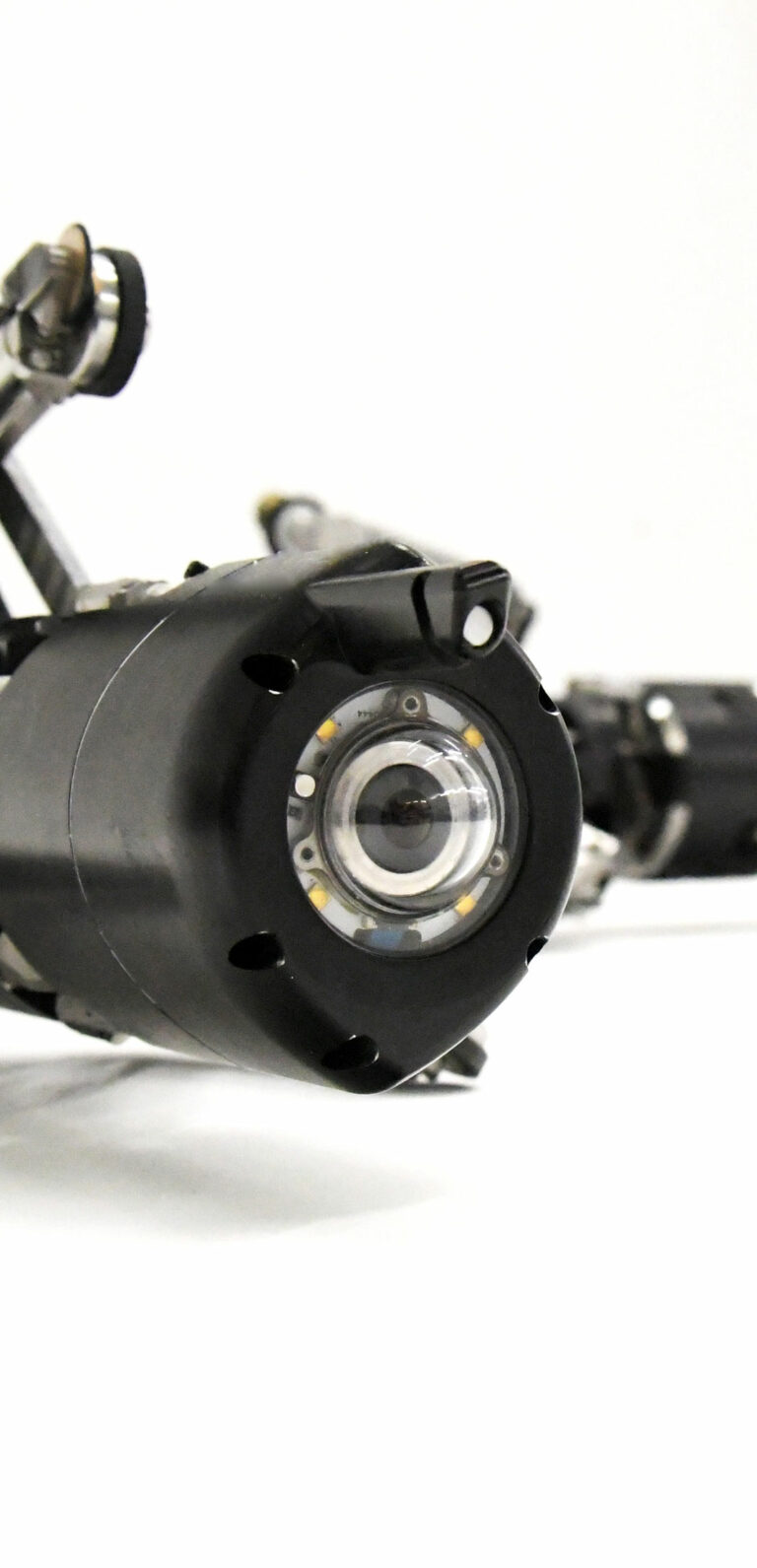
De autonome inspectierobot AIR kan helpen bij het opsporen van lekkage en corrosie in de waterleiding en het in kaart brengen van complete netwerken. Wij hebben de gelede robot ontworpen als een constructietechnisch en mechatronisch hoogstandje met vijftien afzonderlijk aangedreven wielen en negentien scharnierend verbonden modules. Die bevatten camera’s, rekenkracht, aandrijvingen, accu’s, oplaadspoelen en sensoren. De robot is een soort slang – uitgestrekt ruim twee meter – die in soms nauwe buizen moet kunnen manoeuvreren, bijvoorbeeld door haakse bochten.
trainen 'op het droge'.
Onze grootste uitdaging was dat de robot volledig autonoom moet kunnen opereren in de leiding, want (draadloze) verbinding met een centrale computer is er niet. De robot werkt daarom onder andere met een zogeheten neuraal netwerk, om door een leiding te kunnen manoeuvreren op basis van de beelden die de camera maakt. Deze besturing hebben we eerst met synthetische data ‘op het droge’ getraind, met name in het interpreteren van de camerabeelden: ziet hij bijvoorbeeld een bocht, een vernauwing, een luchtbel of een obstakel? Verder kan hij met een hydrofoon lekkages ‘horen’.

“de besparingen kunnen gigantisch zijn.”
Schoon drinkwater is een van de mondiale uitdagingen waarvoor technologische innovatie oplossingen kan bieden. De besparingen op het onderhouden van de leidingnetwerken en uiteindelijk het garanderen van de waterkwaliteit door de inzet van de inspectierobots kunnen gigantisch zijn. Daarnaast zijn er bijvoorbeeld leidingen voor koelwater of proceswater die moeten worden geïnspecteerd. Daar zien we ook kansen.